
Next year marks a major step forward for autonomous mobility: Xpeng will introduce three Robotaxi models in mass production and begin large-scale deliveries. These vehicles are designed to operate without dependence on high-precision maps or LiDAR, and they are built to generalize across diverse environments so they can run beyond tightly constrained zones. Taken together, these technical choices and the planned consumer spin-off create a compelling picture of how autonomous driving could become more scalable, resilient, and useful to everyday life.

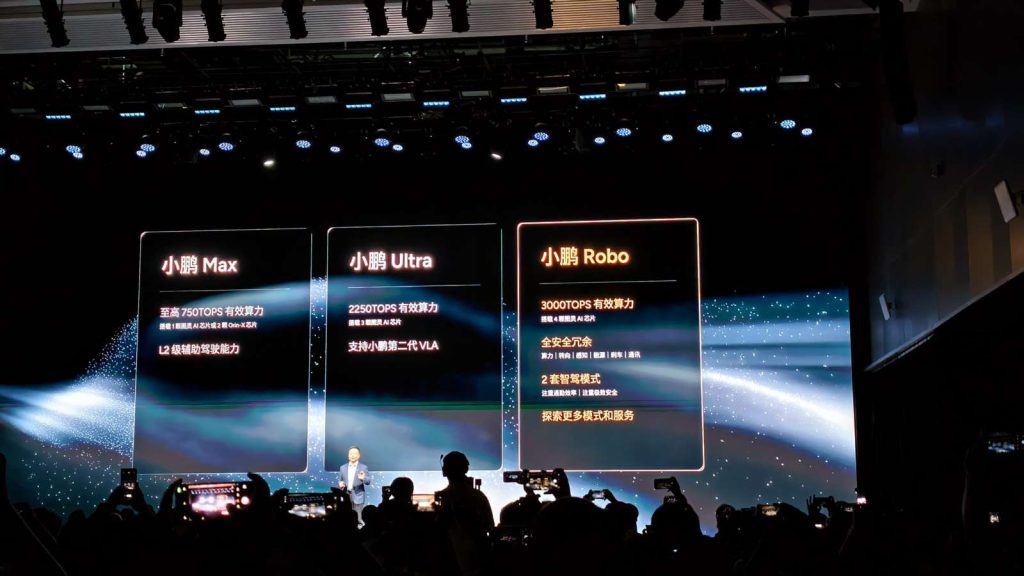
What’s especially striking about the Robotaxi hardware is the compute backbone: each vehicle integrates four Turing chips delivering 3,000 TOPS of on-board compute, among the highest levels reported for any production car today. That compute headroom is deliberately provisioned for Level 4 (L4) driving capabilities — the class of autonomy that can handle driving without human intervention within a defined operational domain. But beyond raw processing power, Xpeng has emphasized redundancy across critical systems. Compute, steering, perception, power, braking, and communications all have dual, mutually backing hardware. This kind of architectural redundancy isn’t just engineering showmanship; it’s a practical approach to safety that aims to keep a vehicle in a safe state even if a component fails.
Removing reliance on high-precision maps and LiDAR shapes the economics and scalability of a Robotaxi fleet. High-definition maps are costly to produce and continually update; LiDAR hardware has been a major expense in many early autonomous fleets. A solution that performs robustly without those anchors can be deployed more quickly across new geographies and adapt to changing road conditions, construction zones, or unexpected events. In other words, a mapless, LiDAR-free approach promises faster geographic expansion and lower operational costs — assuming the perception and localization systems are reliable enough in practice. That explains the emphasis on compute power and redundancy: if you are replacing external mapping and sensing crutches, the vehicle needs to sense and reason extremely well on its own.

Safety will obviously be the top public concern. Redundant steering actuators, duplicated braking systems, independent perception pipelines, and secondary compute stacks are common-sense mitigations to reduce single points of failure. But safety also hinges on software maturity, edge-case handling, and rigorous validation across millions of miles and countless scenarios. The ability to generalize — to handle rare or unusual scenes without pre-mapped context — is what will determine whether these Robotaxis can truly operate “unlimited region” routes rather than being constrained to carefully curated corridors.
Alongside the fleet-focused Robotaxi, Xpeng will introduce a consumer-facing model called Robo that shares the same technical lineage. Described as a “Someone is driving” (human-present) vehicle with L4-level performance, this car is aimed at ordinary drivers who want the benefits of advanced autonomy while still satisfying current legal and regulatory requirements. In practice, that means the Robo will offer the same sensing and compute foundations as the Robotaxi but will be sold as a car that a person can drive and that can assist in very advanced ways — smoothing commuting, offering high-capability driver assistance, and potentially taking over in certain situations.

The most powerful vision the company presents is social: imagine a future, subject to regulatory approval, where an owned Robo can autonomously fetch groceries for an elderly parent, drive a child to school, or ferry a housebound family member to appointments. That use-case is where personal autonomy and societal value intersect. A trusted, dependable vehicle that can operate autonomously at L4 performance could reduce isolation for seniors, free up time for working caregivers, and provide safer transport options for people who are unable or unwilling to drive.
Of course, several non-technical factors will determine how quickly that future arrives. Regulation and legal frameworks need to evolve to permit unattended autonomous operation in public spaces. Insurance models must adapt to account for new failure modes and shared responsibility between manufacturers and operators. Public acceptance will require transparent safety records, third-party validation, and demonstrable improvements over human-driven alternatives. Operationally, robust maintenance, secure over-the-air updates, and safe fallback procedures will be essential for real-world deployment at scale.
There are also economic and societal questions: how will Robotaxi fleets impact ride-hailing labor models? Will consumer Robo ownership complement or substitute for public transit? If autonomy truly becomes mapless and LiDAR-free at scale, the cost curve for deploying services will change, enabling new business models and accessibility options — but that transition needs careful policy guidance to avoid unintended consequences.
In short, Xpeng’s next-generation Robotaxi and consumer Robo outline a promising, pragmatic path toward practical autonomy: high compute and redundant hardware, mapless operation for better scalability, and a shared technology stack that serves both public fleets and private drivers. If the engineering claims hold up in real-world operation and regulations keep pace, the coming years could see autonomous vehicles moving out of test corridors and into everyday life — picking up passengers, doing errands, and offering real tangible assistance to people who need it most. It’s an exciting milestone, and one to watch closely as hardware, software, and policy converge.











暂无评论内容